

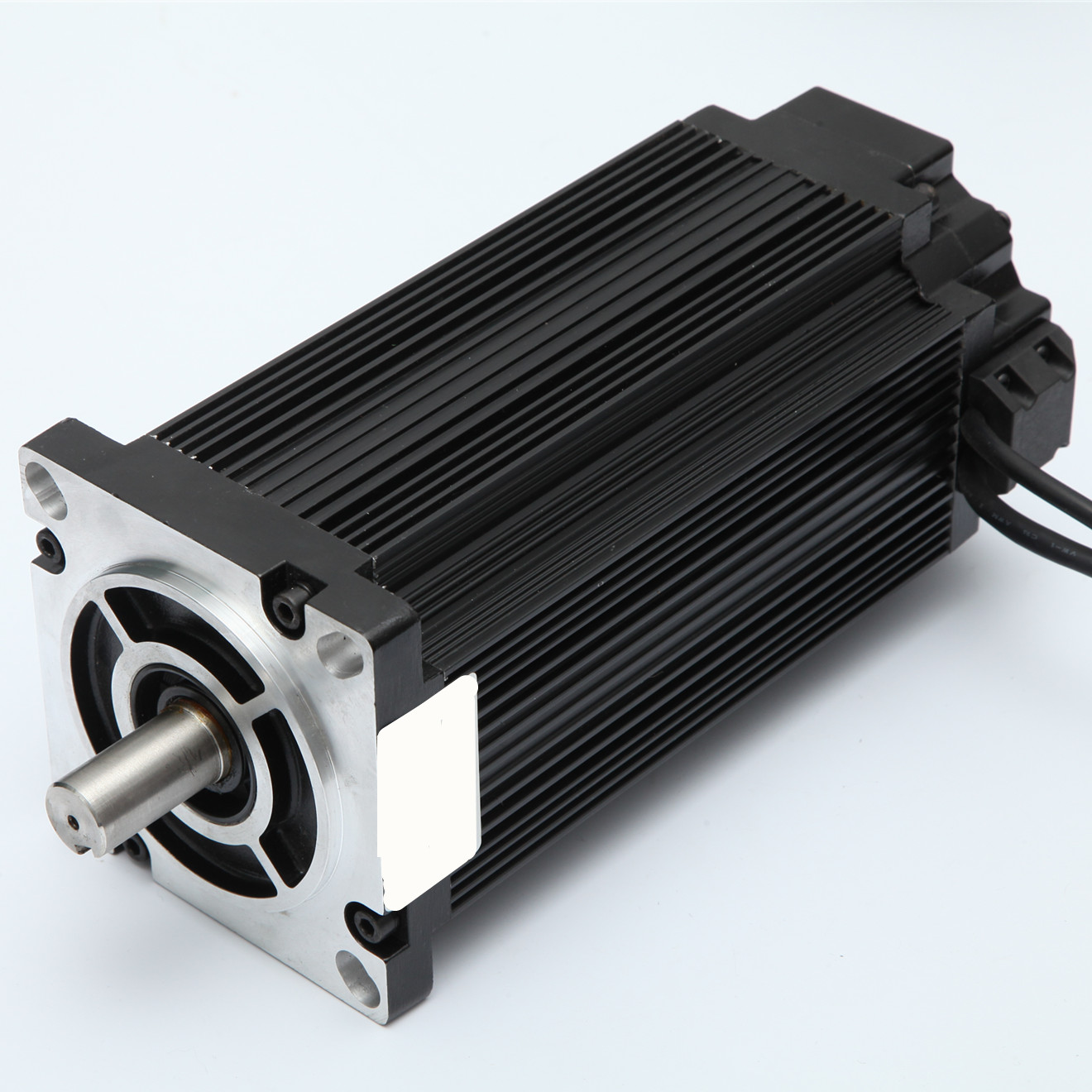
motora gavê nema42, motora gavê, motora gavê,nema42
motora gavê nema42, motora gavê, motora gavê,nema42,
nema42, motora gavê nema42, Stepper Motor, Steping Motor,
NEMA42 Rêzeya Servo ya Hêsan (NEMA42 Rêzeya Girtî ya Girtî)
Parametreyên Elektrîkê yên Motor:
| Awa | Goşeya gavê | Niha (A) | Berxwedan (Ω±10%) | Inductance (mH±20%) | Tork hilgirtin (Nm) | Dirêjahiya motorê (mm) | Encoder Resolution (PPR) | Driver Applicable |
| 110HCE12N-B39 | 1.2° | 4.2 | 1.2 | 13 | 12 | 139 | 1000 | 3HSS2260 |
| 110HCE20N-B39 | 1.2° | 4.2 | 1.88 | 18 | 20 | 221 | 1000 | 3HSS2260 |
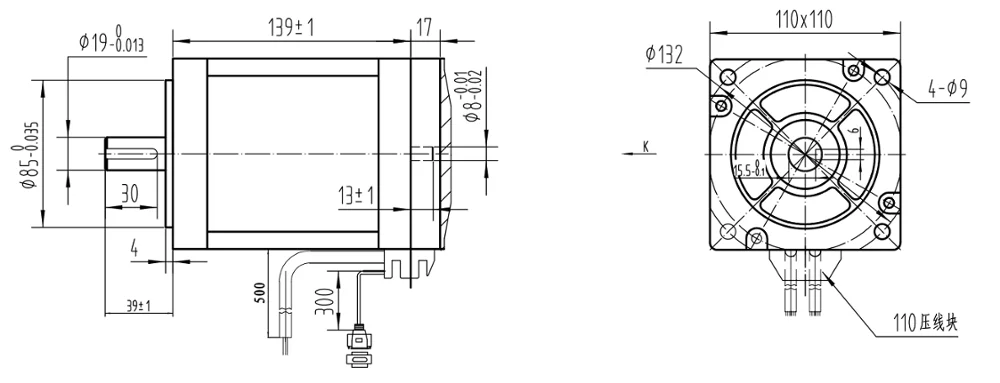
Pîvana motorê: mm
Tork / Frequency Curve
Ajokar 3HSS2260
Features
1, 32-bit DSP û teknolojiya kontrolê ya vektorî ya girtî
2, Bêyî ku gav winda bike, di pozîsyonê de rastbûna bilind
3, Hêza hilberîna motorê û leza xebatê baştir bikin
4, Teknolojiya kontrola heyî ya guhêrbar, bilindbûna germahiya motorê asteng dike
5, Bi cûrbecûr şert û mercên barkirina mekanîkî (di nav de pêlên kêm-hişkî) ve girêdayî bibin, na
pêdivî ye ku pîvana qezencê rast bikin
6, Tevgera nerm û pêbawer, vibrasyona kêm, di lezkirinê de çêtirbûnek mezin
decelerate
7, Hêza leza sifir a statîk bêyî vibrasyonê
8, Bi 3-qonaxa 86 (NEMA34) û 110 (NEMA 42) motora servo ya hîbrid ve girêdayî ye
9, Herî zêde frekansa gav-pulse 200KHZ
10, gavê mîkro 400-60000 pêl / rev
11, Rêjeya voltaja AC150-240V
12, Zêdetir niha, ser voltaja û parastina pozîsyonê
13, Şeş dîmendera tîrêjê dîjîtal, sazkirina parametreyan hêsan e û şopandina xebitandina motorê
rewş
Hilbijartina Microstep:
| Navê dizî | Binavî | Dirêjahî | Nirxa Bingehîn | Bingotin |
| PA0 | Hejmara Versiyon | 501 | Qedexe ye ku biguherîne | |
| PA1 | Hilbijartina Moda Kontrolê | 0~2 | 0 | |
| PA2 | Hilbijartina Type Motor | 0~2 | 0 | |
| PA3 | Power On Display | 0~7 | 0 | |
| PA4 | Loop Niha Kp | 0~1000 | 200 | Qedexe ye ku biguherîne |
| PA5 | Current Loop Ki | 0~1000 | 300 | Qedexe ye ku biguherîne |
| PA6 | Position Loop Kp | 0~1000 | 300 | |
| PA7 | Mîhengkirina gavên mîkro | 400~60000 | 4000 | |
| PA8 | Çareserkirina şîfreker (1000) | 4000 | Qedexe ye ku biguherîne | |
| PA9 | Çareserkirina şîfreker (1000) | 40~30000 | 1000 | |
| PA10 | Holding Current | 10~100 | 40 | |
| PA11 | Current Loop Girtî | 10~100 | 100 | |
| PA12 | Alîdanînî | |||
| PA13 | Alîdanînî | |||
| PA14 | Asta çalak bike | 0/1 | 0 | |
| PA15 | Asta Alarm | 0/1 | 0 | |
| PA16 | Hilbijartina Moda Pulse | 0/1 | 0 | |
| PA17 | Pulse Edge | 0/1 | 0 | |
| PA18 | Direction Rotation Motor | 0/1 | 0 | |
| PA19 | Leza JOG | 1~200 | 60 | |
| PA20 | Beşa Moda PEND | 0/1 | 0 | |
| PA21 | Asta PEND | 0/1 | 0 |
Pîvana ajoker (mm):
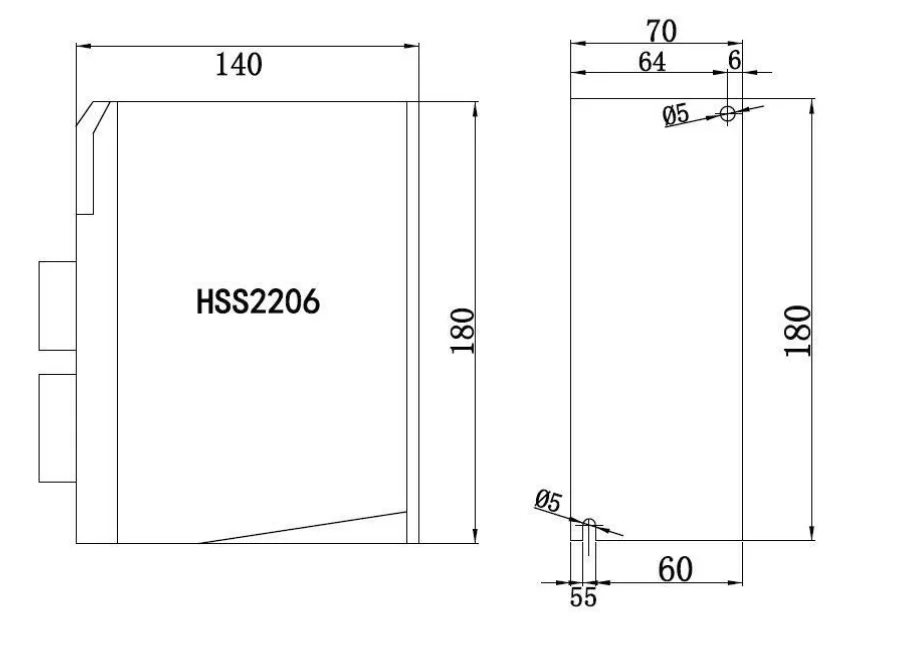
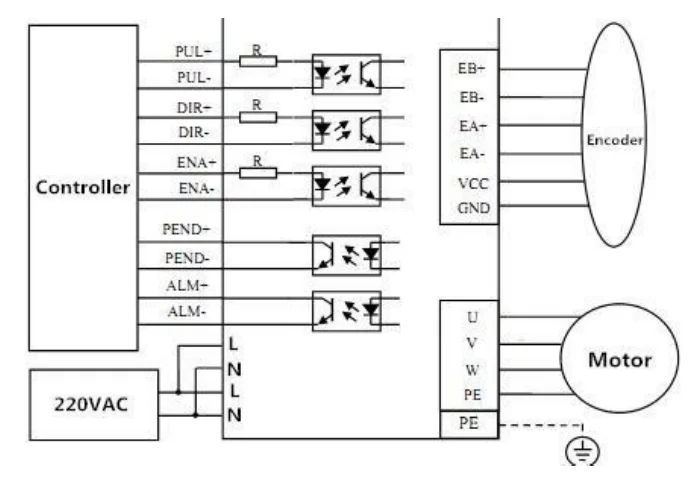
Diagrama Têlêkirinê:
nema42motora gavê,
motora gavê,
motora gavê,
nema42



,planetary gearbox,worm gearbox,reliable and durable,suitable for all kinds of motors, such as dc motors ,servo motors and stepper motor,to get bigger torque")
