

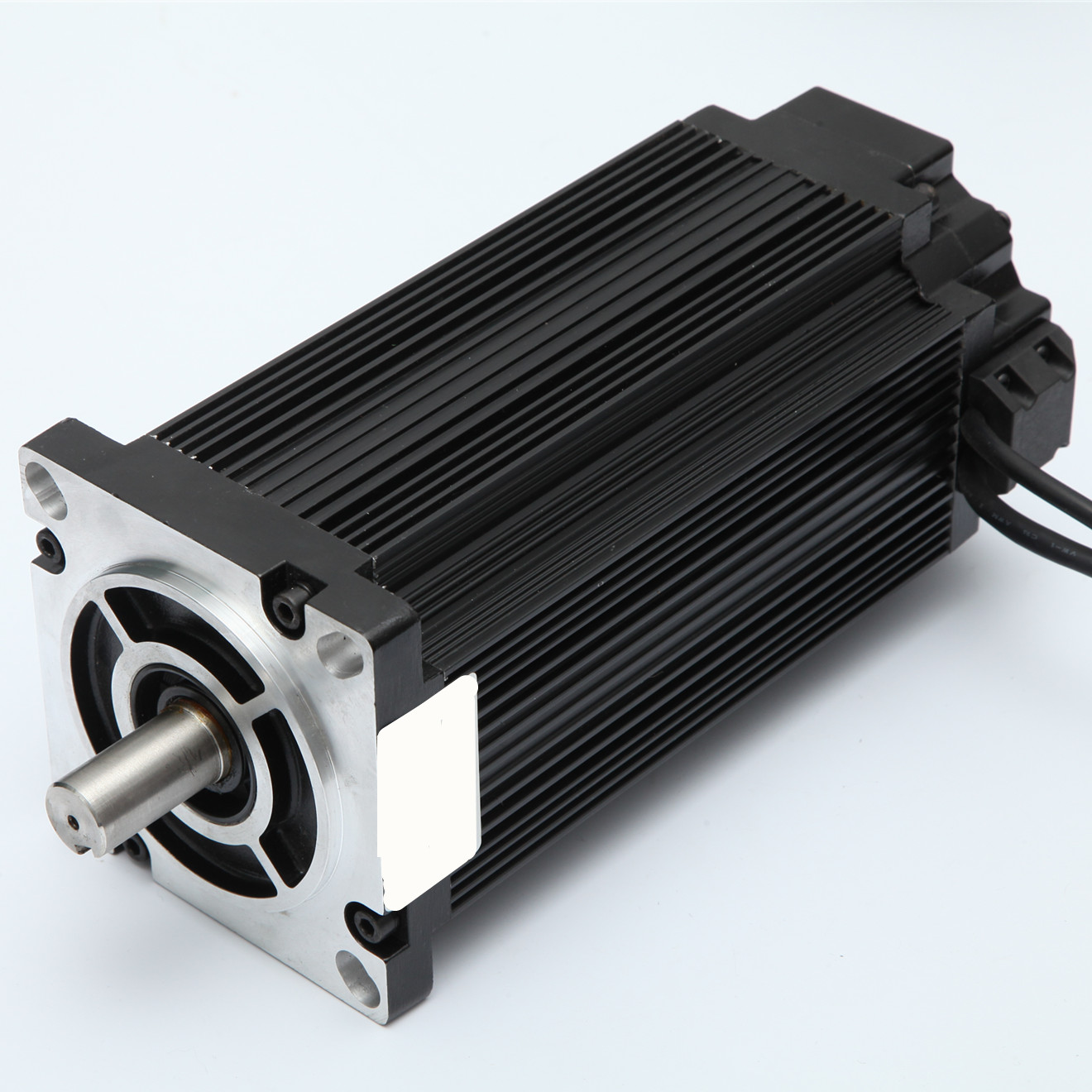
voltaja bilind display dîjîtal 220V Nema42 girtî loop 12Nm stepper motor
NEMA42 Rêzeya Servo ya Hêsan (NEMA42 Rêzeya Girtî ya Girtî)
Parametreyên Elektrîkê yên Motor:
| Awa | Goşeya gavê | Niha (A) | Berxwedan (Ω±10%) | Inductance (mH±20%) | Tork hilgirtin (Nm) | Dirêjahiya motorê (mm) | Encoder Resolution (PPR) | Driver Applicable |
| 110HCE12N-B39 | 1.2° | 4.2 | 1.2 | 13 | 12 | 139 | 1000 | 3HSS2260 |
| 110HCE20N-B39 | 1.2° | 4.2 | 1.88 | 18 | 20 | 221 | 1000 | 3HSS2260 |
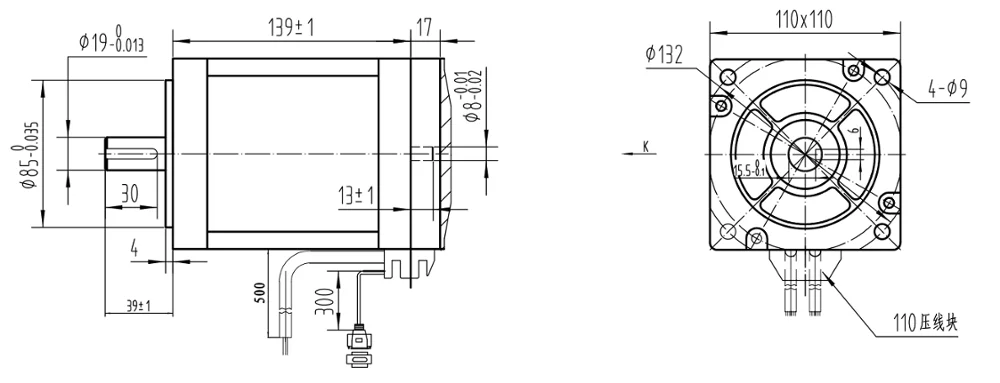
Pîvana motorê: mm
Tork / Frequency Curve
Ajokar 3HSS2260
Features
1, 32-bit DSP û teknolojiya kontrolê ya vektorî ya girtî
2, Bêyî ku gav winda bike, di pozîsyonê de rastbûna bilind
3, Hêza hilberîna motorê û leza xebatê baştir bikin
4, Teknolojiya kontrola heyî ya guhêrbar, bilindbûna germahiya motorê asteng dike
5, Bi cûrbecûr şert û mercên barkirina mekanîkî (di nav de pêlên kêm-hişkî) ve girêdayî bibin, na
pêdivî ye ku pîvana qezencê rast bikin
6, Tevgera nerm û pêbawer, vibrasyona kêm, di lezkirinê de çêtirbûnek mezin
decelerate
7, Hêza leza sifir a statîk bêyî vibrasyonê
8, Bi 3-qonaxa 86 (NEMA34) û 110 (NEMA 42) motora servo ya hîbrid ve girêdayî ye
9, Herî zêde frekansa gav-pulse 200KHZ
10, gavê mîkro 400-60000 pêl / rev
11, Rêjeya voltaja AC150-240V
12, Zêdetir niha, ser voltaja û parastina pozîsyonê
13, Şeş dîmendera tîrêjê dîjîtal, sazkirina parametreyan hêsan e û şopandina xebitandina motorê
rewş
Hilbijartina Microstep:
| Navê dizî | Binavî | Dirêjahî | Nirxa Bingehîn | Bingotin |
| PA0 | Hejmara Versiyon | 501 | Qedexe ye ku biguherîne | |
| PA1 | Hilbijartina Moda Kontrolê | 0~2 | 0 | |
| PA2 | Hilbijartina Type Motor | 0~2 | 0 | |
| PA3 | Power On Display | 0~7 | 0 | |
| PA4 | Loop Niha Kp | 0~1000 | 200 | Qedexe ye ku biguherîne |
| PA5 | Current Loop Ki | 0~1000 | 300 | Qedexe ye ku biguherîne |
| PA6 | Position Loop Kp | 0~1000 | 300 | |
| PA7 | Mîhengkirina gavên mîkro | 400~60000 | 4000 | |
| PA8 | Çareserkirina şîfreker (1000) | 4000 | Qedexe ye ku biguherîne | |
| PA9 | Çareserkirina şîfreker (1000) | 40~30000 | 1000 | |
| PA10 | Holding Current | 10~100 | 40 | |
| PA11 | Current Loop Girtî | 10~100 | 100 | |
| PA12 | Alîdanînî | |||
| PA13 | Alîdanînî | |||
| PA14 | Asta çalak bike | 0/1 | 0 | |
| PA15 | Asta Alarm | 0/1 | 0 | |
| PA16 | Hilbijartina Moda Pulse | 0/1 | 0 | |
| PA17 | Pulse Edge | 0/1 | 0 | |
| PA18 | Direction Rotation Motor | 0/1 | 0 | |
| PA19 | Leza JOG | 1~200 | 60 | |
| PA20 | Beşa Moda PEND | 0/1 | 0 | |
| PA21 | Asta PEND | 0/1 | 0 |
Pîvana ajoker (mm):
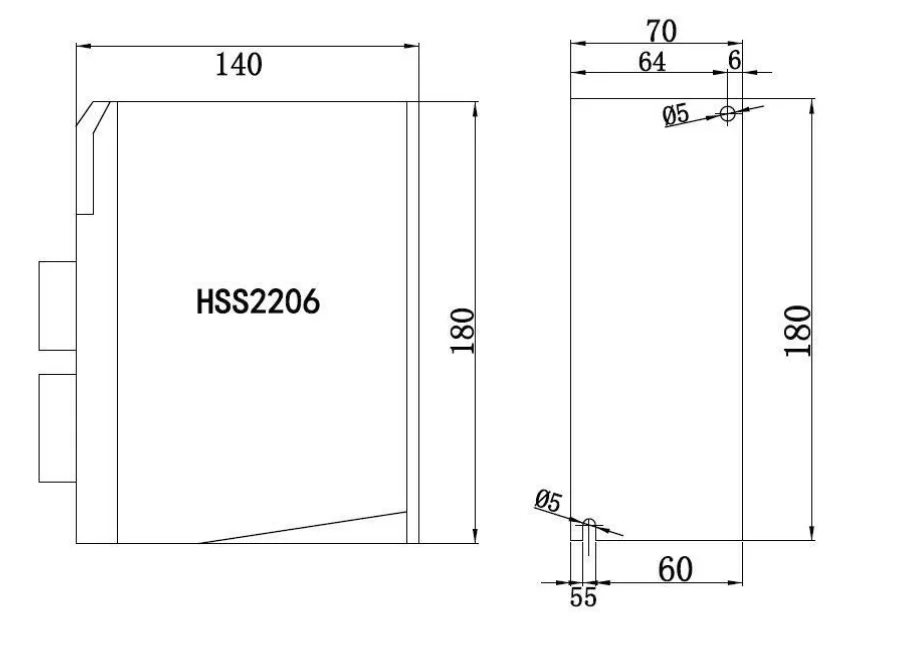
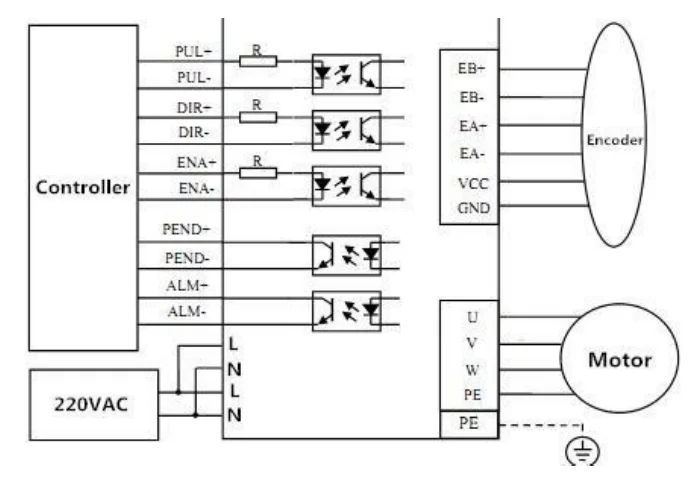
Diagrama Têlêkirinê:



,planetary gearbox,worm gearbox,reliable and durable,suitable for all kinds of motors, such as dc motors ,servo motors and stepper motor,to get bigger torque")
